top of page




空気圧人工筋肉用コントローラ
PMCシリーズ
空気圧人工筋肉用コントローラ PMCシリーズ
設計・選定要らずのプログラム制御可能な電磁弁
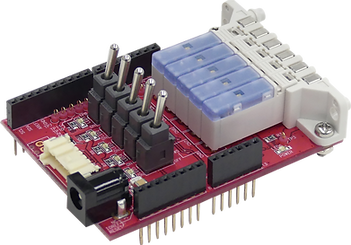
空気圧人工筋肉用コントローラ PMCシリーズは、Arduino uno R3に対応したシールド基板です。(Arduinoは別売りです。)
人工筋肉の伸び縮みを制御するための弁が5台搭載されています。
圧縮空気を発生させる空気圧源と、Arduinoを用意するだけで、人工筋肉の伸び縮みのタイミング、時間を手軽に制御可能になります。


トグルスイッチ
手動で弁をON/OFFさせることも可能
Arduino(マイクロコントローラ)
電気で動く弁(電磁弁)のON/OFFタイミング、
ONする時間、OFFする時間などを各弁ごとにプログラムすることができます。
電磁弁(5台搭載)
手動操作なしでプログラムした通りにON/OFFします。
PMC詳細
PMCシリーズとは
一般的に、弁のON/OFFの時間やタイミングをプログラムで制御させるには、写真に示すような機器の用意、配線・配管が必要です。
電磁弁にも様々な種類、大きさがあり、条件に合ったものを選定する必要があります。
更に、電磁弁に欲しい動きをさせるための電気回路設計、プログラミングを1から行う手間が生じます。
弁の選定・プログラムの構築が不要に
PMCシリーズには、空気圧人工筋肉を動かすための電磁弁が搭載されているため、電磁弁の選定、配線の手間が省けます。
空気圧源とArduinoをご用意いただくだけで、プログラムで操作可能な人工筋肉の制御機構が完成します。
機器選定や回路設計にかかる時間を、用途開発や応用研究などに費やすことができるようになります。
(Arduinoは付属しておりませんので、ご用意ください。)
電磁弁の代わりに接続コネクタを搭載したタイプもありますので、自身でバルブを選定し制御させることも可能です。
空気圧人工筋肉以外の制御の用途にも。

電源
PLC(プログラム制御用コンピュータ)
電磁弁
端子台
Before

After
空気圧人工筋肉用コントローラ
PMC
Arduino
電磁弁
【PMCシリーズ 紹介動画】



ご購�入案内
下記リンクよりご購入いただけます。
PMC-PT-AC
(バルブ搭載型)
.png)
PMC-CN-AC
(バルブ接続用コネクタ搭載型)
.png)
Amazonリンク
株式会社コガネイ MIRAI事業部
〒184-8533
東京都小金井市緑町3-11-28
042-383-7138


bottom of page